Open source SDK.
A single toolchain to log, transform, query, view, and train on
multi-rate, multimodal data.
A flexible framework to build with rather than a platform you can't change.
pip install rerun-sdk
rerunVisualize everything
Review datasets, debug detail-level issues, and extend with your own views and tools for every stage of the pipeline.
Query and transform
Full dataframe or SQL queries over any robotics data. Extend with post-processing or annotations as easily as adding columns to a table.
Log, store, and convert
Store multi-rate, multimodal data as column-chunks in rrd files. Either log directly or easily convert from any other format.
Open Source Stewardship
We’re an active contributor to the open source projects we all love and rely on.
Infrastructure that powers your data loop
The production backend for the Rerun data layer. Catalog, byte-range indexing, and retrieval that turns your object stores into a queryable, streamable foundation. Run transforms on the edge or close to the data.
Query
Query into your recordings with SQL
Run any SQL or dataframe query across your catalog, down into the columns, time ranges, and values inside your recordings, not just their metadata.
Transform
Refine your data without copies
Add derived columns and evolve schemas without breaking history. You run the transforms with the SDK; Hub keeps the derived data and your raw recordings organized together.
Train
Train without an export step
Express a dataset mix as a query and stream it to your GPUs. The dataloader is column-aware and video-codec-aware, so you train directly on your recordings.
Share
Everyone works from the same data
One viewer, the same recordings, shared across the team. Explore, annotate, and trace a failure back to the data that caused it.
News
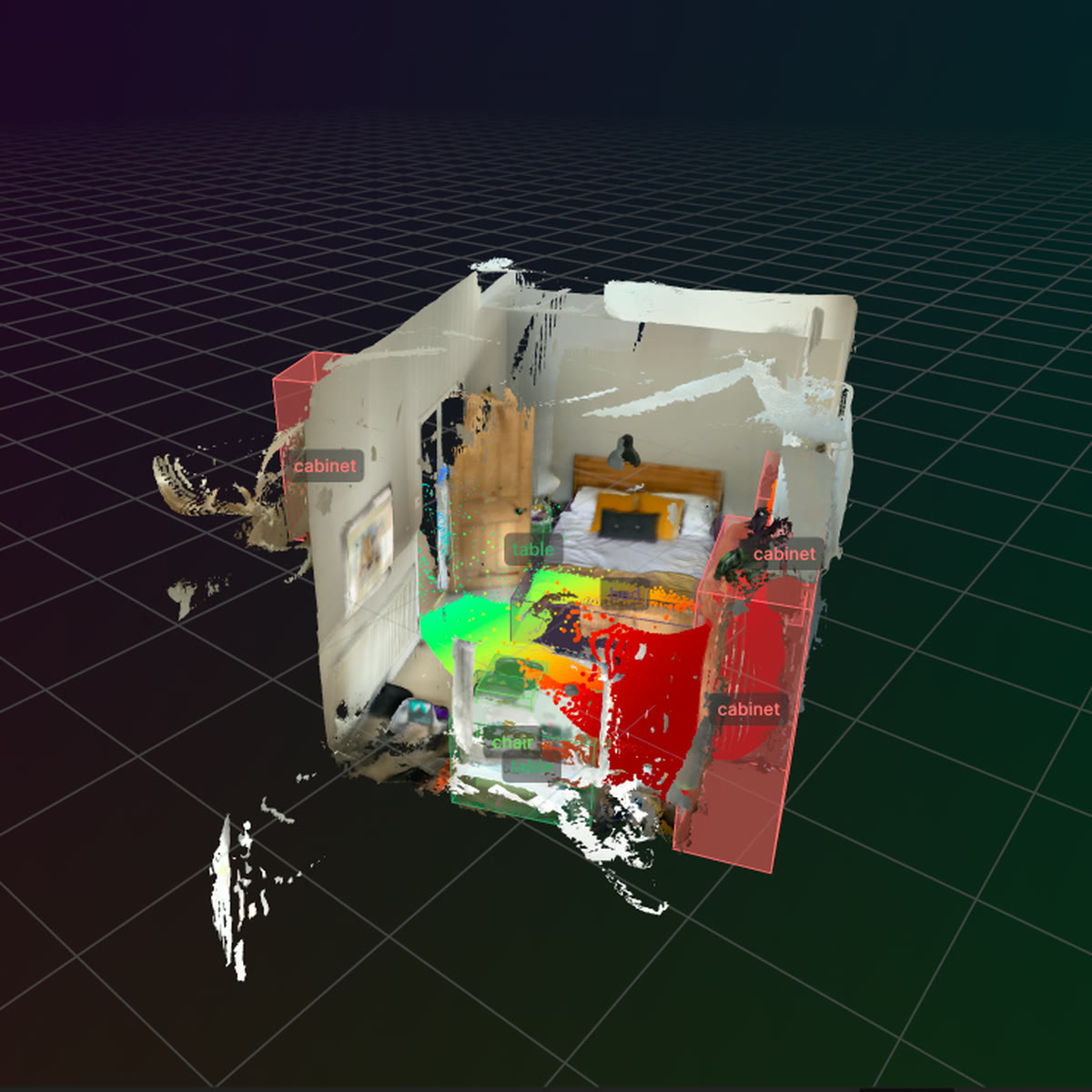
Spotlight: 3D reconstruction is a data layer problem
3D reconstruction runs on multimodal, multi-rate data, and handling that data is most of the work. This is a worked example of what Rerun's data layer removes from a real project: all 5,015 ARKitScenes scans converted into recordings that the viewer, the dataframe API, and the PyTorch dataloader read directly, no export step in between.







