Robotics
nuScenes
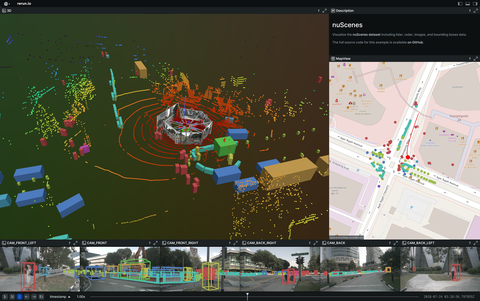
Visualize the nuScenes dataset including lidar, radar, images, and bounding boxes data.
Used Rerun types
Transform3D, Points3D, Boxes3D, Pinhole, EncodedImage
Background
This example demonstrates the ability to read and visualize scenes from the nuScenes dataset, which is a public large-scale dataset specifically designed for autonomous driving. The scenes in this dataset encompass data collected from a comprehensive suite of sensors on autonomous vehicles. These include 6 cameras, 1 LIDAR, 5 RADAR, GPS and IMU sensors. Consequently, the dataset provides information about the vehicle's pose, the images captured, the recorded sensor data and the results of object detection at any given moment.
Logging and visualizing with Rerun
The visualizations in this example were created with the following Rerun code:
Sensor calibration
First, pinhole cameras and sensor poses are initialized to offer a 3D view and camera perspective. This is achieved using the Pinhole and Transform3D archetypes.
rr.log(
f"world/ego_vehicle/{sensor_name}",
rr.Transform3D(
translation=calibrated_sensor["translation"],
rotation=rr.Quaternion(xyzw=rotation_xyzw),
relation=rr.TransformRelation.ParentFromChild,
),
static=True,
)rr.log(
f"world/ego_vehicle/{sensor_name}",
rr.Pinhole(
image_from_camera=calibrated_sensor["camera_intrinsic"],
width=sample_data["width"],
height=sample_data["height"],
),
static=True,
)Timelines
All data logged using Rerun in the following sections is initially connected to a specific time.
Rerun assigns a timestamp to each piece of logged data, and these timestamps are associated with timelines.
rr.set_time("timestamp", timestamp=sample_data["timestamp"] * 1e-6)Vehicle pose
As the vehicle is moving, its pose needs to be updated. Consequently, the positions of pinhole cameras and sensors must also be adjusted using Transform3D.
rr.log(
"world/ego_vehicle",
rr.Transform3D(
translation=ego_pose["translation"],
rotation=rr.Quaternion(xyzw=rotation_xyzw),
relation=rr.TransformRelation.ParentFromChild,
),
)GPS data
GPS data is calculated from the scene's reference coordinates and the transformations (starting map point + odometry).
The GPS coordinates are logged as GeoPoints.
rr.log(
"world/ego_vehicle",
rr.GeoPoints([[lat, long]]),
)LiDAR data
LiDAR data is logged as Points3D archetype.
rr.log(f"world/ego_vehicle/{sensor_name}", rr.Points3D(points, colors=point_colors))Camera data
Camera data is logged as encoded images using EncodedImage.
rr.log(f"world/ego_vehicle/{sensor_name}", rr.EncodedImage(path=data_file_path))Radar data
Radar data is logged similar to LiDAR data, as Points3D.
rr.log(f"world/ego_vehicle/{sensor_name}", rr.Points3D(points, colors=point_colors))Annotations
Annotations are logged as Boxes3D, containing details such as object positions, sizes, and rotation.
rr.log(
"world/anns",
rr.Boxes3D(
sizes=sizes,
centers=centers,
quaternions=quaternions,
class_ids=class_ids,
fill_mode=rr.components.FillMode.Solid,
),
)GPS coordinates are added to the annotations similarly to the vehicle.
Setting up the default blueprint
The default blueprint for this example is created by the following code:
sensor_views = [
rrb.Spatial2DView(
name=sensor_name,
origin=f"world/ego_vehicle/{sensor_name}",
# Set the image plane distance to 5m for all camera visualizations.
defaults=[rr.Pinhole.from_fields(image_plane_distance=5.0)],
overrides={"world/anns": rr.Boxes3D(fill_mode="solid")},
)
for sensor_name in nuscene_sensor_names(nusc, args.scene_name)
]
blueprint = rrb.Vertical(
rrb.Horizontal(
rrb.Spatial3DView(name="3D", origin="world"),
rrb.Vertical(
rrb.TextDocumentView(origin="description", name="Description"),
rrb.MapView(
origin="world",
name="MapView",
zoom=rrb.archetypes.MapZoom(18.0),
background=rrb.archetypes.MapBackground(rrb.components.MapProvider.OpenStreetMap),
),
row_shares=[1, 1],
),
column_shares=[3, 1],
),
rrb.Grid(*sensor_views),
row_shares=[4, 2],
)We programmatically create one view per sensor and arrange them in a grid layout, which is convenient when the number of views can significantly vary from dataset to dataset. This code also showcases the row_shares argument for vertical containers: it can be used to assign a relative size to each of the container's children. A similar column_shares argument exists for horizontal containers, while grid containers accept both.
Run the code
To run this example, make sure you have the required Python version, the Rerun repository checked out and the latest SDK installed:
pip install --upgrade rerun-sdk # install the latest Rerun SDK
git clone git@github.com:rerun-io/rerun.git # Clone the repository
cd rerun
git checkout latest # Check out the commit matching the latest SDK releaseInstall the necessary libraries specified in the requirements file:
pip install -e examples/python/nuscenes_datasetTo experiment with the provided example, simply execute the main Python script:
python -m nuscenes_dataset # run the exampleIf you wish to customize it, explore additional features, or save it use the CLI with the --help option for guidance:
python -m nuscenes_dataset --help